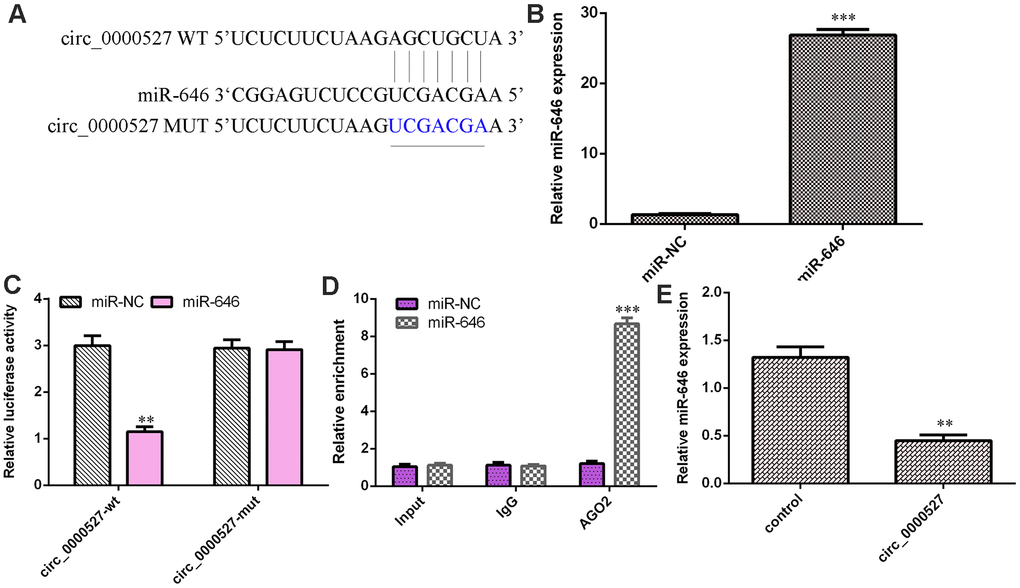
Figure 5.circ_0000527 sponged miR-646 expression in osteosarcoma cells. (A) As predicted by Starbase, circ_0000527 might be regulated by miR-646. (B) The level of miR-646 was measured by a qRT-PCR assay. (C) The overexpression of miR-646 significantly decreased the luciferase value of WT circ_0000527 but did not have an effect on mut circ_0000527. (D) A RIP assay illustrated that overexpression of miR-646 could be enriched with circ_0000527. (E) The elevated expression of circ_0000527 suppressed miR-646 expression in MG-63 cells. ** p<0.01.