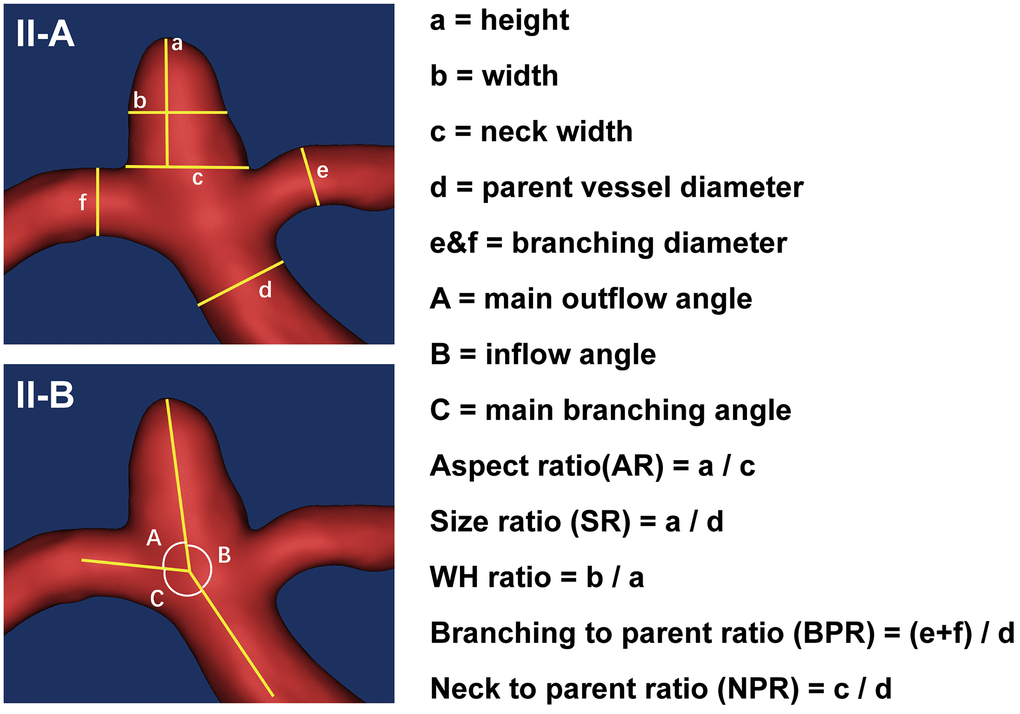
Figure 3.Measurements of the traditional morphological features. (II-A) schematically shows the aneurysm size and diameters of parent and branch vessels measurements, with the height (a), width (b), neck width (c), the diameter of the parent vessel (d), diameters of the branching vessel (e and f). (II-B) shows the angle measurements. The outflow angle (A) was defined as the angle at which the aneurysm flows outward to the distal parent artery in the sidewall aneurysm or to the daughter branch most approaching 180° in the bifurcation aneurysm. The inflow angle (B) was defined as the angle from the parent artery into the aneurysm. The main branching angle (C) was defined as the angle of the parent artery in the sidewall aneurysm or the angle between the parent artery and the daughter branch most approaching 180° in bifurcation aneurysm. In addition, several indicators were calculated: aspect ratio (AR) was defined as the ratio of aneurysm height (a) to the neck width (c); size ratio (SR) was defined as the ratio of aneurysm height (a) to the parent vessel diameter (d); WH ratio was defined as the ratio of aneurysm width (b) to the height (a); branching to parent ratio (BPR) was defined as the ratio of the sum of the diameters of the branch vessels (e + f) to the diameter of the parent artery (d) (in case of a sidewall aneurysm, the BPR was set to 1); neck to parent ratio (NPR) was defined as the ratio of the aneurysm neck width (c) to the parent artery diameter (d).