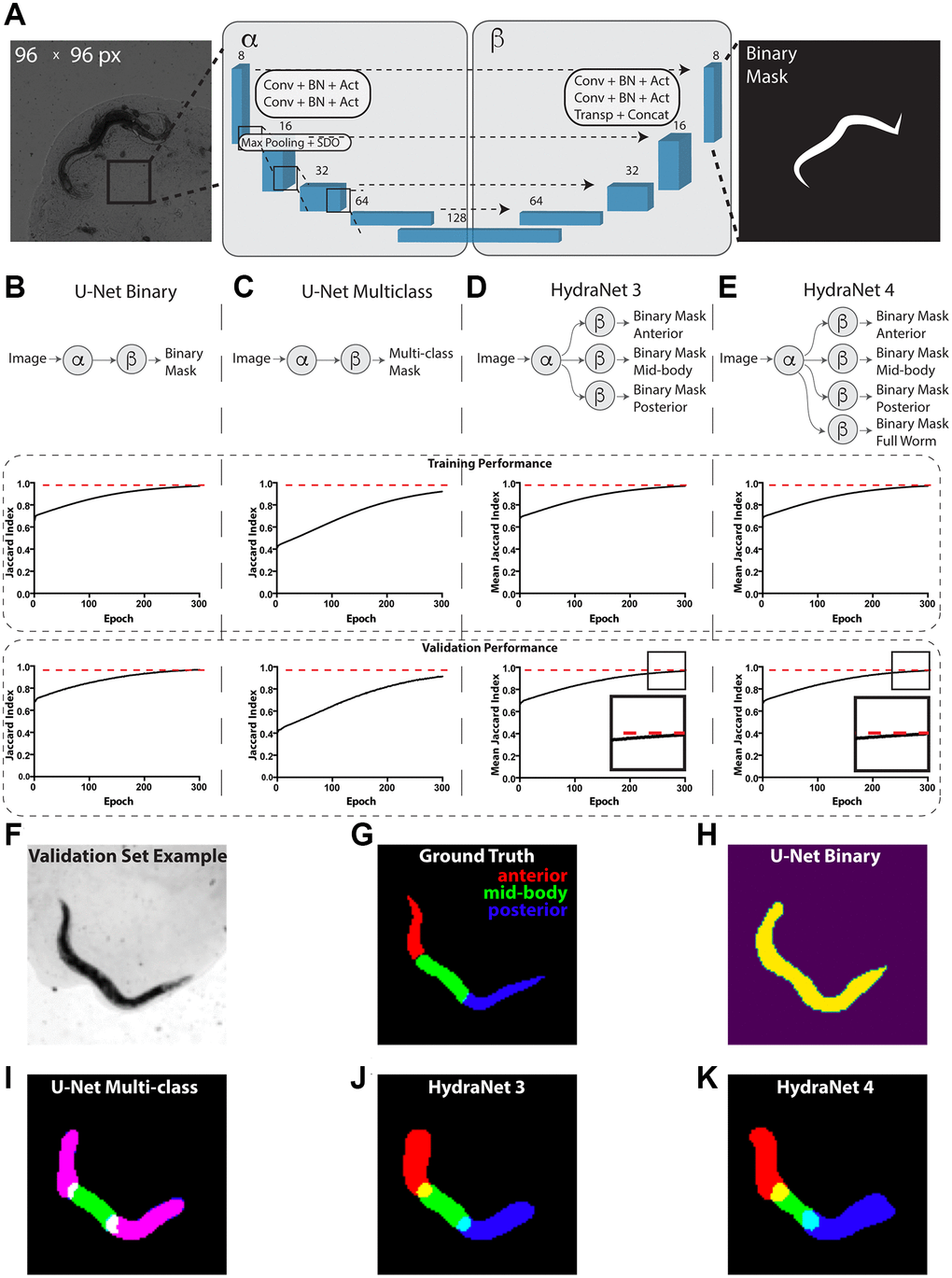
Figure 1.Devising worm body parts segmentation strategy. (A) Schematic depiction of the U-Net architecture adopted from [24]. Here, the transmission light micrograph of C. elegans used as input is depicted on the left-hand side. The reference size of the field-of-view is 580.5 μm by 580.5 μm sized to 96 × 96 pixels. A schematic depiction of a binary mask used as output is depicted on the right-hand side. The displayed numbers correspond to the number of filters in convolutional (Conv), batch normalization (BN) and activation (Act) layers. Max pooling layers were combined with spatial dropout (SDO). Arrows correspond to skip connections from encoder to the mirroring decoder layer where a new layer is a result of concatenation (Concat) of a layer from the encoder part to the transposed convolutional layer (Transp) from the decoder part. For illustration purposes, parts of architecture were grouped into left (α) and right (β) parts. (B) Schematic depiction of the binary classification U-Net architecture variant. (C) Schematic depiction of the multi-class classification U-Net architecture variant. (D) Schematic depiction of the HydraNet 3 architecture variant (E) Schematic depiction of the HydraNet 4 architecture variant (B–E) Here α is the left and β is the right part of the architecture in (A). Graphs below show training and validation segmentation performance of the network measured as Jaccard Index for each training epoch. (F) Test set input data example. (G) Ground truth of C. elegans body parts segmentation example. (H) Output example of binary classification U-Net on the test data. (I) Output example of multi-class U-Net on the test data. Here, red and blue colored masks overlap making anterior and posterior parts appear magenta. (J) Output example of HydraNet 3 on the test data. (K) Output example of HydraNet 4 on the test data.