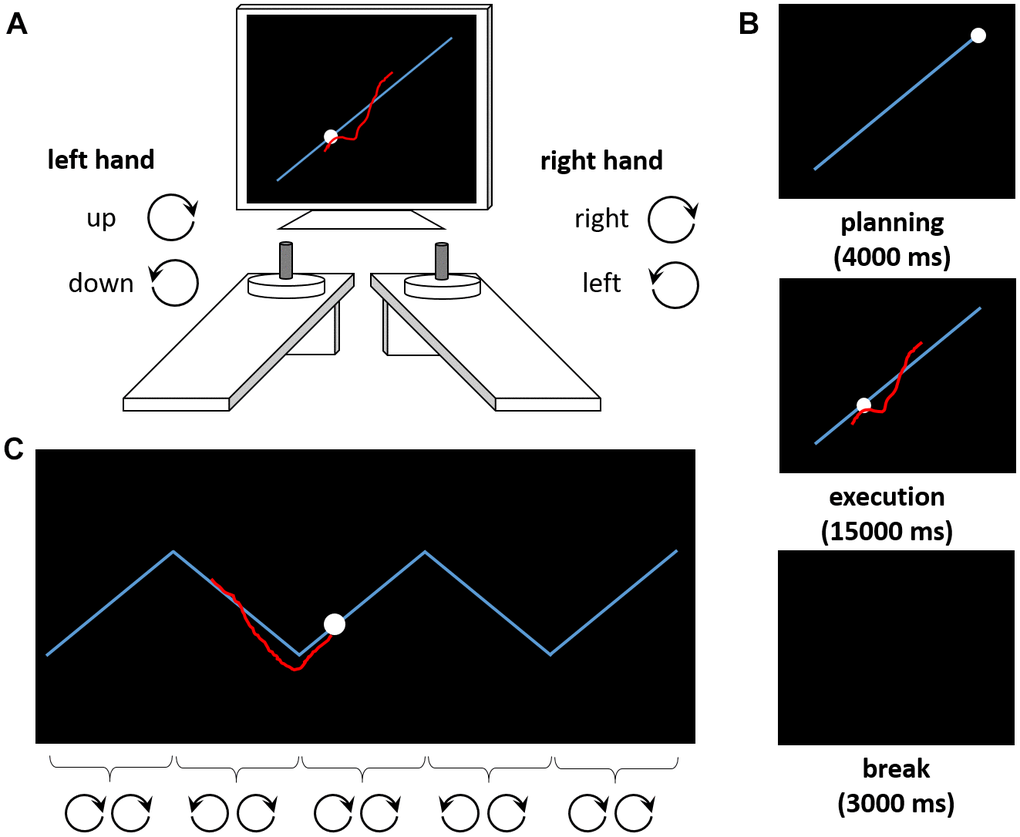
Figure 1.The Bimanual Tracking Task (BTT). (A) The task setup consists of two dials placed in front of a computer screen. Participants are asked to rotate both dials simultaneously to track a moving dot along a target line. Rotating the left dial clockwise (counterclockwise) causes the red cursor to move upward (downward) along the Y-axis, whereas rotating the right dial clockwise (counterclockwise) causes the cursor to move to the right (left) along the X-axis. (B) Exemplary trial sequence. After a planning phase of 4000 ms, the movement is executed (15000 ms). A break of 3000 ms precedes the next trial. (C) Exemplary trial from the zigzag condition. The target trajectory requires periodic switches in the rotation of one (here: left) hand, whereas the other (here: right) hand should continue its movement. For illustration purposes, the correct rotation directions for both hands are indicated for each segment of the zigzag trajectory here.